





Control de inicio para competencias de robótica
Control de inicio para competencias de robótica
SKU:MB00187
Control de inicio con botones START y STOP, diseñado específicamente para competencias de robótica sumo y seguidores de línea. Funciona con baterías AA (3.3–5 V), ideal para encender o detener robots de forma remota y segura.
20 en existencias
No se pudo cargar la disponibilidad de retiro


🛠️Características
- Fabricante: Mecabot
- Tipo de baterías: AA
- Canales disponibles: 32
- Dimensiones: 76mm x 41mm x 25mm (Sin baterías)
-
Peso: 25.3g (Sin baterías)
📦 Contenido del producto
1 x Micro servomotor SG90S piñonería plástica
Uso y aplicaciones
🧠 Aplicaciones
- Inicio/parada en competencias de robots sumo/minisumo
- Pruebas y entrenamientos de seguidores de línea
- Activación remota de robots velocistas
- Seguridad en ensayos de campo
-
Integración en kits educativos de robótica
🔌 Compatibilidad y uso
- Compatible con módulos de inicio y controladores Mecabot
- Diseño plug‑and‑play sin configuración previa
- Ideal para eventos y pruebas donde se requiere control externo
-
Fácil instalación en circuitos de robótica competitiva
Recursos
📥 Descargables
Guía de uso: Guía de uso para el control de inicio y módulo de arranque
Código del módulo de inicio: Módulo de inicio - Arduino
📄 Guia de uso
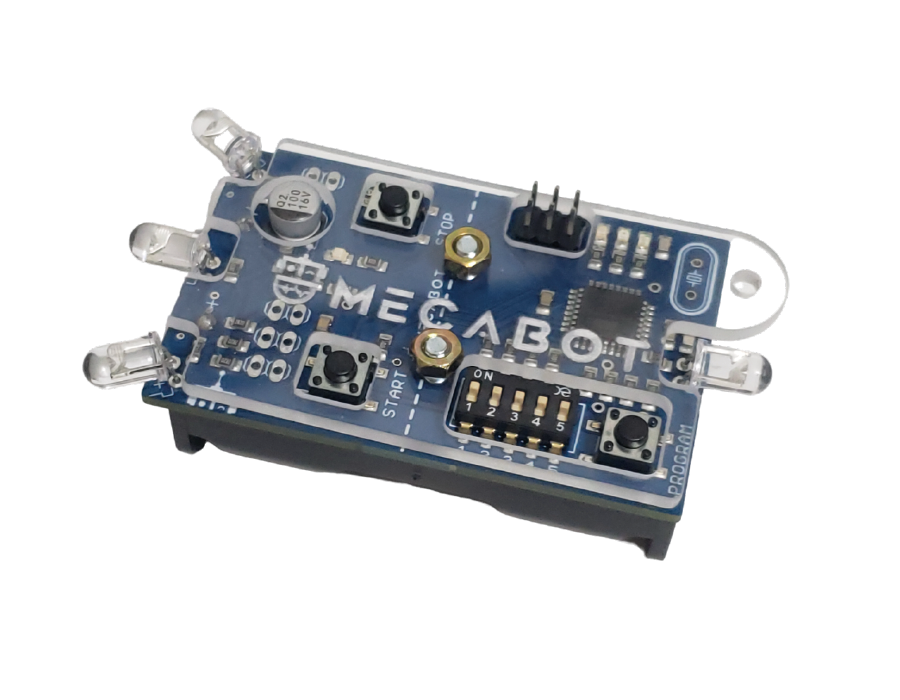
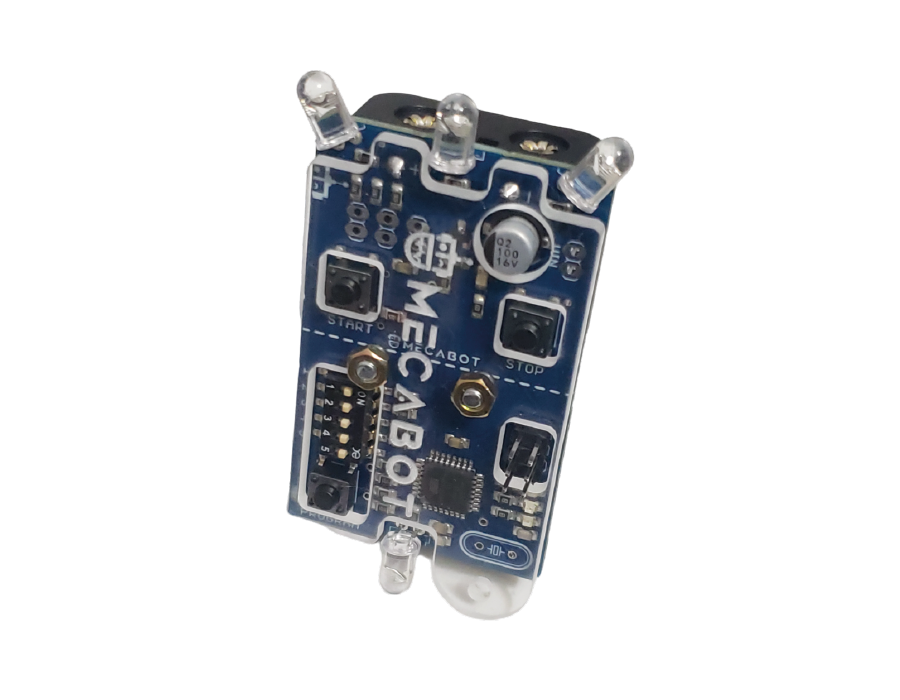
1. Sobre el control de arranque
El Control Profesional es un dispositivo diseñado para enviar señales de “Start”, “Stop” y “program” de forma remota a uno o varios módulos de inicio, permitiendo arranques simultáneos en competencias de robótica como sumo, minisumo, seguidor de línea, entre otros.
Permite configurar hasta 32 canales diferentes (gracias al Dip Switch de 5 posiciones) para sincronizar los robots con sus respectivos módulos de arranque.

2. ¿Cómo funciona?
- Botón de Start: Una vez pulsado este botón, enviará la señal a los módulos sincronizados para que pasen a estado “Start”, en consecuencia el led de dichos módulos se encenderá.
- Botón de Stop: Una vez pulsado este botón, enviará la señal a los módulos sincronizados para que pasen a estado “Stop”, en consecuencia el led de dichos módulos comenzará a parpadear.
- Botón de Program: Para vincular uno o varios módulos con el control se debe seguir los siguientes pasos:
-
- Ajusta el Dip Switch en la posición de canal deseada.
- Enciende el robot con el módulo de arranque conectado.
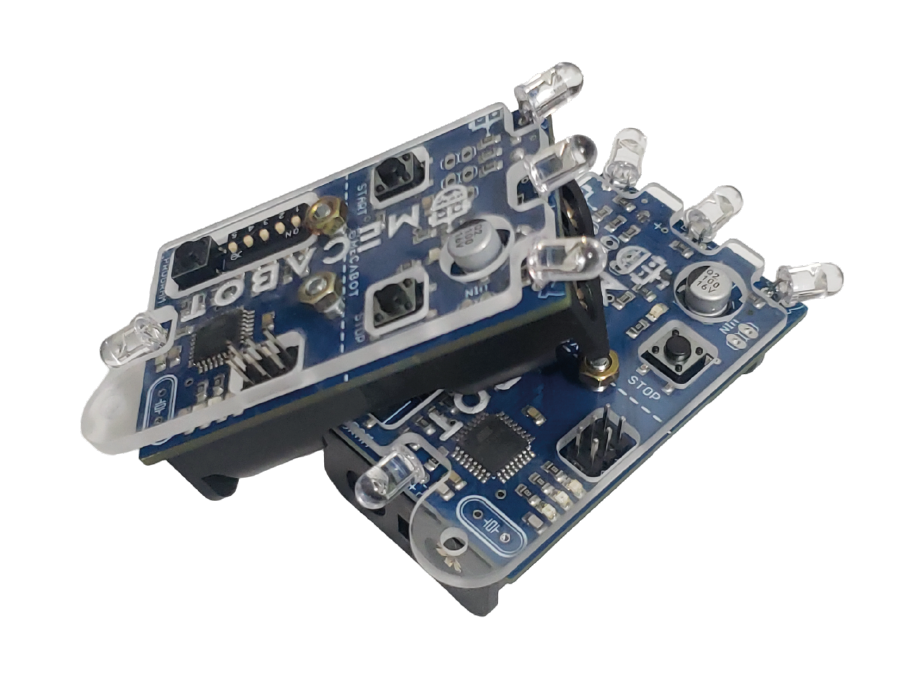
- Apunta el emisor trasero del control hacia el módulo.
- Pulsa el botón de “Program”.
- El led del módulo parpadeará 2 veces indicando que ha sido programado correctamente.

3. Problemas típicos
- El control no activa el módulo de arranque: Sucede cuando es pulsado el botón de “Start” pero el led del módulo no se enciende, indicando que no ha recibido la señal. Las causas comunes a este problema están atribuidas a factores como no tener el canal que corresponde al programado con el módulo o en su defecto ni si quiera haber programado el módulo. La solución consiste en reprogramar el (los) módulo(s) para garantizar su correcto funcionamiento. Nota: Dado que estos sistemas funcionan con luz infrarroja es importante tener en cuenta que la cantidad de luz natural o ambiental puede afectar la emisión y/o lectura de las señales.
- El control no programa el módulo de arranque: Sucede cuando, a pesar de pulsar el botón de “Program”, el módulo de arranque no se sincroniza y en consecuencia no es posible arrancar el robot. La solución para este problema radica en garantizar que el emisor trasero del control de arranque esté apuntando al módulo cuando es pulsado el botón de “Program”, además, es importante garantizar que las pilas del control de arranque se encuentren completamente cargadas. Finalmente, asegúrate que el módulo de arranque se encuentre alimentado simultáneamente con la tarjeta de control.
- Alcance del control muy limitado: Sucede cuando cualquiera de los botones es pulsado durante el funcionamiento del robot, pero estos no cumplen con sus respectivas funciones, las posibles soluciones consisten en garantizar que tanto los emisores del control como los receptores del módulo se encuentren limpios y libres de cualquier tipo de obstrucción física, por otro lado, es importante asegurarse que el control esté apuntando correctamente al módulo cuando cualquiera de los botones sea presionado. Finalmente, es importante garantizar que las pilas del control de arranque se encuentren completamente cargadas.