





Regleta de 16 sensores de línea multiplexada
Regleta de 16 sensores de línea multiplexada
SKU:MB00286
Precio habitual
$110.000,00
Precio habitual
Precio de oferta
$110.000,00
Precio unitario
por
Los gastos de envío se calculan en la pantalla de pago.
Regleta con 16 sensores IR QRE1113 multiplexados mediante el chip 74HC4067. Permite leer todos los sensores utilizando solo 5‑6 pines del microcontrolador, ideal para followers velocistas y robots de eficiencia en la detección de línea
Agotado
No se pudo cargar la disponibilidad de retiro

🛠️Características
- Fabricante: Mecabot
- Voltaje de operación: 3.3V - 5V
- Consumo de corriente a 5V: 150mA
- Consumo de corriente a 3.3V: 100mA
- Tipo de salida: Análoga
- Cantidad de pines: 10
-
Tipo de conector:
- Regleta 2.54mm de 10 pines
- Conector FFC/FPC de 10 pines
- Cantidad de sensores: 16 (QRE1113)
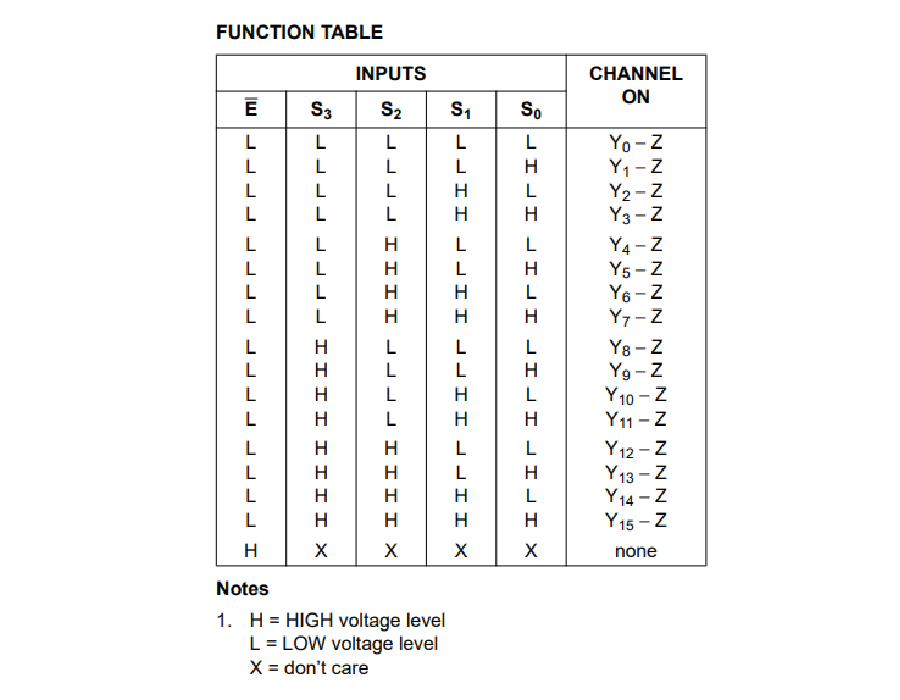
- Multiplexor: 74HC4067
- Leds programables: 3
- Leds indicadores de encendido: 2
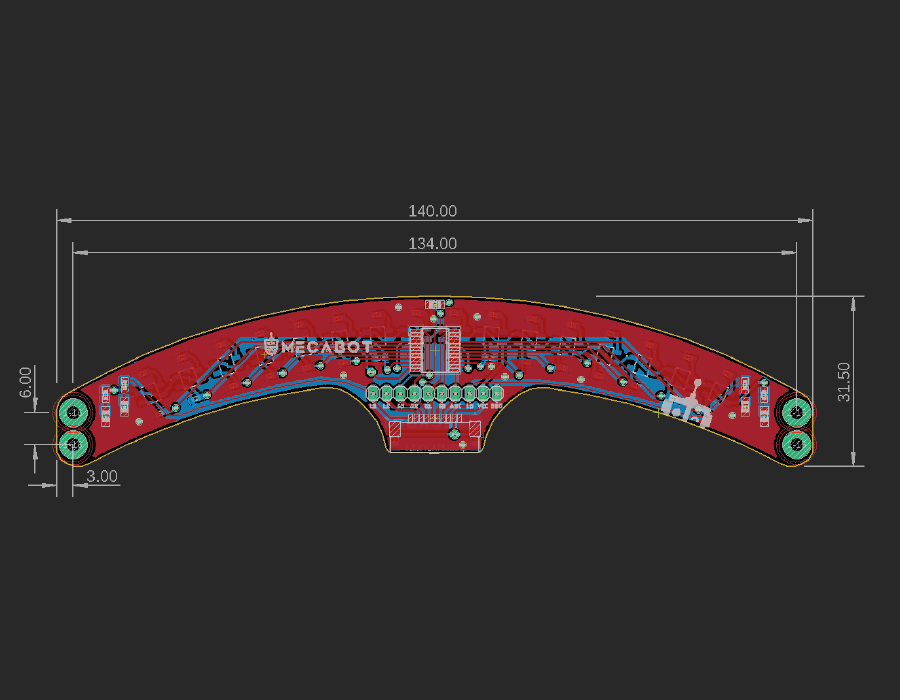
- Dimensiones: 140mm x 31.5mm
- Peso: 10g
📦 Contenido del producto
1 x Regleta de 16 sensores de línea multiplexada
Uso y aplicaciones
🧠 Aplicaciones
- Robots seguidores de línea velocistas
- Proyectos de robótica competitiva
- Automatización precisa de movimiento en maquetas
-
Laboratorios y demostraciones en robótica
🔌 Compatibilidad y uso
- Compatible con Arduino, ESP32, STM32, etc.
- Lee 16 sensores con solo 5‑6 pines gracias al multiplexor
- Alimentación directa a 5 V, lectura digital/analógica según microcontrolador
-
Se integra fácilmente en chasis con soportes Mecabot o adaptadores FFC/FPC
Recursos
📥 Descargables
Hoja de datos: QRE1113
Código Arduino: Regleta de 16 sensores - Mecabot
📟 Ejemplo básico de lectura en Arduino
//CODIGO EJEMPLO DESARROLLO POR MECABOT SAS - ESPERAMOS QUE TE SIRVA :)
//Definición de pines para Arduino Nano, Arduino Uno
#define ADC A0 //Pin de lectura analogica **Obligatorio
#define S0 10 //Pin de salida digital
#define S1 9 //Pin de salida digital
#define S2 8 //Pin de salida digital
#define S3 7 //Pin de salida digital
#define LedRI 6 //Pin de salida digital - Led izquierdo
#define LedRC 5 //Pin de salida digital - Led centro
#define LedRD 4 //Pin de salida digital - Led derecho
//Definición de funciones para ON/OFF leds
#define LEDION digitalWrite(LedRI, HIGH)
#define LEDIOFF digitalWrite(LedRI, LOW)
#define LEDCON digitalWrite(LedRC, HIGH)
#define LEDCOFF digitalWrite(LedRC, LOW)
#define LEDDON digitalWrite(LedRD, HIGH)
#define LEDDOFF digitalWrite(LedRD, LOW)
uint16_t anaSensores[] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
boolean digSensores[] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
void setup(){
pinMode(ADC, INPUT);
pinMode(S0, OUTPUT);
pinMode(S1, OUTPUT);
pinMode(S2, OUTPUT);
pinMode(S3, OUTPUT);
pinMode(LedRI, OUTPUT);
pinMode(LedRC, OUTPUT);
pinMode(LedRD, OUTPUT);
Serial.begin(9600);
Serial.println("Hola: Prueba de regleta Mecabot");
LEDION;
LEDCON;
LEDDON;
delay(1000);
LEDIOFF;
LEDCOFF;
LEDDOFF;
delay(1000);
}
void leerSensores(){
digitalWrite(S0, LOW);
digitalWrite(S1, LOW);
digitalWrite(S2, LOW);
digitalWrite(S3, LOW);
anaSensores[0] = analogRead(ADC);
digitalWrite(S0, HIGH);
digitalWrite(S1, LOW);
digitalWrite(S2, LOW);
digitalWrite(S3, LOW);
anaSensores[1] = analogRead(ADC);
digitalWrite(S0, LOW);
digitalWrite(S1, HIGH);
digitalWrite(S2, LOW);
digitalWrite(S3, LOW);
anaSensores[2] = analogRead(ADC);
digitalWrite(S0, HIGH);
digitalWrite(S1, HIGH);
digitalWrite(S2, LOW);
digitalWrite(S3, LOW);
anaSensores[3] = analogRead(ADC);
digitalWrite(S0, LOW);
digitalWrite(S1, LOW);
digitalWrite(S2, HIGH);
digitalWrite(S3, LOW);
anaSensores[4] = analogRead(ADC);
digitalWrite(S0, HIGH);
digitalWrite(S1, LOW);
digitalWrite(S2, HIGH);
digitalWrite(S3, LOW);
anaSensores[5] = analogRead(ADC);
digitalWrite(S0, LOW);
digitalWrite(S1, HIGH);
digitalWrite(S2, HIGH);
digitalWrite(S3, LOW);
anaSensores[6] = analogRead(ADC);
digitalWrite(S0, HIGH);
digitalWrite(S1, HIGH);
digitalWrite(S2, HIGH);
digitalWrite(S3, LOW);
anaSensores[7] = analogRead(ADC);
digitalWrite(S0, LOW);
digitalWrite(S1, LOW);
digitalWrite(S2, LOW);
digitalWrite(S3, HIGH);
anaSensores[8] = analogRead(ADC);
digitalWrite(S0, HIGH);
digitalWrite(S1, LOW);
digitalWrite(S2, LOW);
digitalWrite(S3, HIGH);
anaSensores[9] = analogRead(ADC);
digitalWrite(S0, LOW);
digitalWrite(S1, HIGH);
digitalWrite(S2, LOW);
digitalWrite(S3, HIGH);
anaSensores[10] = analogRead(ADC);
digitalWrite(S0, HIGH);
digitalWrite(S1, HIGH);
digitalWrite(S2, LOW);
digitalWrite(S3, HIGH);
anaSensores[11] = analogRead(ADC);
digitalWrite(S0, LOW);
digitalWrite(S1, LOW);
digitalWrite(S2, HIGH);
digitalWrite(S3, HIGH);
anaSensores[12] = analogRead(ADC);
digitalWrite(S0, HIGH);
digitalWrite(S1, LOW);
digitalWrite(S2, HIGH);
digitalWrite(S3, HIGH);
anaSensores[13] = analogRead(ADC);
digitalWrite(S0, LOW);
digitalWrite(S1, HIGH);
digitalWrite(S2, HIGH);
digitalWrite(S3, HIGH);
anaSensores[14] = analogRead(ADC);
digitalWrite(S0, HIGH);
digitalWrite(S1, HIGH);
digitalWrite(S2, HIGH);
digitalWrite(S3, HIGH);
anaSensores[15] = analogRead(ADC);
}
void imprimirLectura(){
Serial.print(anaSensores[0]);
Serial.print("\t");
Serial.print(anaSensores[1]);
Serial.print("\t");
Serial.print(anaSensores[2]);
Serial.print("\t");
Serial.print(anaSensores[3]);
Serial.print("\t");
Serial.print(anaSensores[4]);
Serial.print("\t");
Serial.print(anaSensores[5]);
Serial.print("\t");
Serial.print(anaSensores[6]);
Serial.print("\t");
Serial.print(anaSensores[7]);
Serial.print("\t");
Serial.print(anaSensores[8]);
Serial.print("\t");
Serial.print(anaSensores[9]);
Serial.print("\t");
Serial.print(anaSensores[10]);
Serial.print("\t");
Serial.print(anaSensores[11]);
Serial.print("\t");
Serial.print(anaSensores[12]);
Serial.print("\t");
Serial.print(anaSensores[13]);
Serial.print("\t");
Serial.print(anaSensores[14]);
Serial.print("\t");
Serial.print(anaSensores[15]);
Serial.print("\n");
}
void loop(){
leerSensores();
imprimirLectura();
delay(20);
}